

Deep Learning brought about revolutions in many machine learning problems from the field of Computer Vision, Natural Language Processing, Reinforcement Learning, etc. But tabular data still remains firmly under classical machine learning algorithms, namely the gradient boosting algorithms(I have a whole series on different Gradient Boosting algorithms, if you are interested).
Intuitively, this is strange, isn’t it? Neural networks are universal approximators and ideally, they should be able to approximate the function even in the tabular data domain. Or may be they can, but need humungous amount of data to properly learn that function? But how does the Gradient Boosted Trees do it so well? May the inductive bias of a decision tree is well suited for tabular data domain?
If they are so good, why don’t we use decision trees in neural networks? Just like we have Convolution Operation for images, and Recurrent Networks for Text, why can’t we use Decision Trees as a basic building block for Tabular data?
The answer is pretty straightforward- Trees are not differentiable and without the gradients flowing through the network, back-prop bombs. But this is where researchers started to bang their heads. How do we make Decision Trees differentiable.
Differentiable Decision Trees
In 2015, Kontschieder et al., presented Deep Neural Decision Forests[1], which had a decision tree-like structure, but differentiable.
Let’s take a step back and think about a Decision Tree.

A typical Decision Tree looks something like the picture above. Simplistically, it is a collection of decision nodes(






Let’s look at the leaf nodes first, because it’s easier. In traditional Decision Trees, the leaf nodes is typically a distribution over the class labels. This is right up the alley of a Sigmoid or a Softmax activation. So we could really replace the leaf nodes with a SoftMax layer and make that node differentiable.
Now, let’s take a deeper look at a decision node. The core purpose of a decision node is to decide whether to route the sample to the left or right. Let’s call these decisions, 


In traditional Decision Trees, this decision is a binary decision; it’s either right or left, 0 or 1. But this is deterministic and not differentiable. Now, what if we relax this and make the routing stochastic. Instead of a sharp 1 or 0, it’s going to be a number between 0 and 1. This feels like familiar territory, doesn’t it? Sigmoid function?
That’s exactly what Kontschieder et al. proposed. If we relax the strict 0-1 decision to a stochastic one with a sigmoid function, the node becomes differentiable.
Now we know how a single node(decision or a leaf node) works. Let’s put them all together. The red path in the diagram above is one of the path in the decision tree. In the deterministic version, a sample either goes through this route or it doesn’t. If we think about the same process in probabilistic terms, we know that the probability of the sample to go in the path should be 1 for every node in that path for the sample to reach the leaf node at the end of the path.
In the probabilistic paradigm, we find the probability that a sample goes left or right(
Probability of the sample reaching the highlighted leaf node would be (
Now, we just need to take the expected value of all the leaf nodes using the probabilities of each of the decision paths to get the prediction for a sample.
Now that you’ve got an intuition about how Decision Tree-like structures were derived to be used in Neural Networks, let’s talk about the NODE model[3].
Neural Oblivious Trees
An Oblivious Tree is a decision tree which is grown symmetrically. These are trees the same features are responsible in splitting learning instances into the left and the right partitions for each level of the tree. CatBoost, a prominent gradient boosting implementation, uses oblivious trees. Oblivious Trees are particularly interesting because they can be reduced to a Decision Table with 

Each Oblivious Decision Tree(ODT) outputs one of 
Formally, the ODT can be defined as :
![h(x) = R[\mathbb{I}(f_1(x)-b_1), ..., \mathbb{I}(f_d(x)-b_d)]](https://s0.wp.com/latex.php?latex=h%28x%29+%3D+R%5B%5Cmathbb%7BI%7D%28f_1%28x%29-b_1%29%2C+...%2C+%5Cmathbb%7BI%7D%28f_d%28x%29-b_d%29%5D&bg=ffffff&fg=192930&s=2&c=20201002)

Now to make the tree output differentiable, we should replace the splitting feature choice(

In Traditional Trees, the choice of a feature to split a node by is a deterministic decision. But for differentiability, we choose a softer approach, i.e. A weighted sum of the features, where the weights are learned. Normally, we would think of a Softmax choice over the features, but we want to have sparse feature selection, i.e. we want the decision to be made on only a handful(preferably 1) features. So, to that effect, NODE uses 

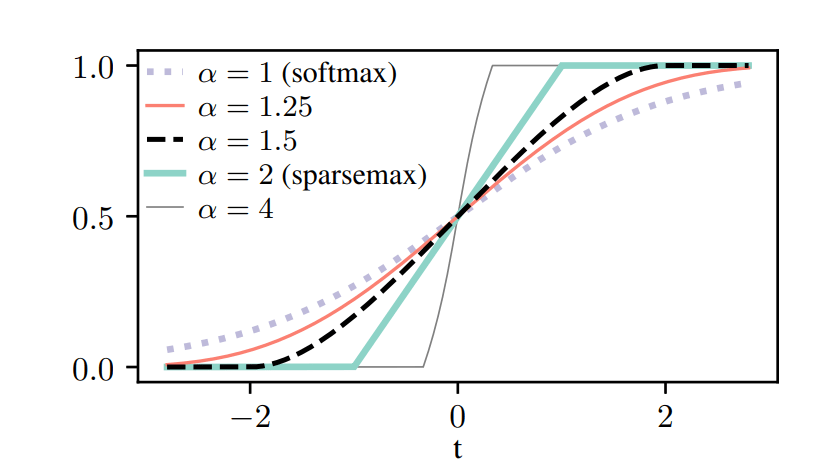
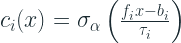
Similarly, we relax the Heaviside function as a two-class entmax. As different features can have different characteristic scales, we scale the entmax with a parameter



We know that a tree has two sides and by 



This gives us the choice weights, or intuitively the probabilities of each of the

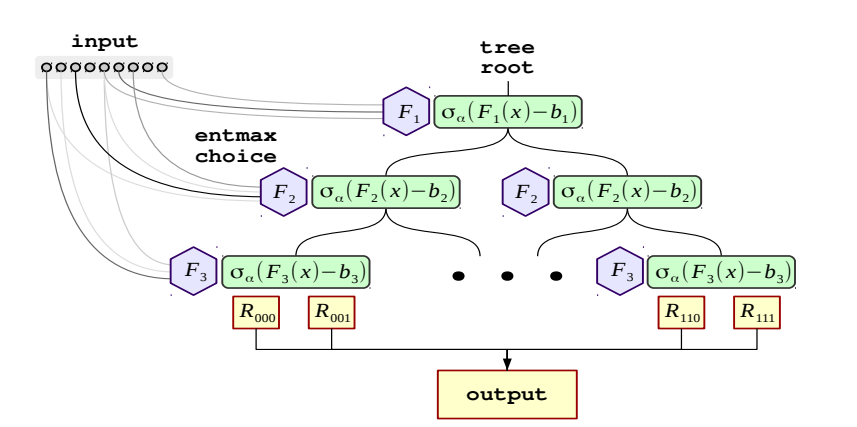
The entire setup looks like the below diagram:
Neural Oblivious Decision Ensembles
The jump from an individual tree to a “forest” is pretty simple. If we have 
![\left[ \hat{h_1}(x), . . . , \hat{h_m}(x) \right]](https://s0.wp.com/latex.php?latex=%5Cleft%5B+%5Chat%7Bh_1%7D%28x%29%2C+.+.+.+%2C+%5Chat%7Bh_m%7D%28x%29+%5Cright%5D&bg=ffffff&fg=192930&s=2&c=20201002)
Going Deeper with NODE
In addition to developing the core module(NODE layer), they also propose a deep version, where we stack multiple NODE layers on top of each other, but with residual connections. The input features and the outputs of all previous layers are concatenated and fed into the next NODE Layer and so on. And finally, the final output from all the layers are averaged(similar to the RandomForest).

Training and Experiments
Data Processing
In all the experiments in the paper[3], they transformed each of the features to follow a normal distribution using a Quantile Transformation. This step was important for stable training and faster convergence.
Initialization
Before training the network, they propose to do data-aware initialization to get good initial parameters. They initialize the Feature Selection matrix(



Experiments and Results
The paper performs experiments with 6 datasets – Epsilon, YearPrediction, Higgs, Microsoft, Yahoo, and Click. They compared NODE with CatBoost, XGBoost and FCNN.
First they compared with default hyperparameters across all the algorithms. the default architecture of NODE was set as below: Single layer of 2048 trees of depth 6. These parameters were inherited from CatBoost default parameters.
Then, they tuned all the algorithms and then compared.

Code and Implementation
The authors have made the implementation available in a ready to use Module in PyTorch here.
It is also implemented in the new library I released, PyTorch Tabular, along with a few other State of the Art algorithms for Tabular data. Check it out here:
References
- P. Kontschieder, M. Fiterau, A. Criminisi and S. R. Bulò, “Deep Neural Decision Forests,” 2015 IEEE International Conference on Computer Vision (ICCV), pp. 1467-1475, doi: 10.1109/ICCV.2015.172.
- Ben Peters, Vlad Niculae, André F. T. Martins, “Sparse Sequence-to-Sequence Models,” 2019 Proceedings of the 57th Annual Meeting of the Association for Computational Linguistics(ACL), pp. 1504-1519, doi: 10.18653/v1/P19-1146.
- Sergei Popov, Stanislav Morozov, Artem Babenko, “Neural Oblivious Decision Ensembles for Deep Learning on Tabular Data,” arXiv:1909.06312 [cs.LG]
